Hardware specification¶
Note
The following hardware specifications are provided here as a general reference; differences with the product may exist.
Scope of delivery¶
Standard delivery for an rc_reason_stack includes the rc_reason_stack sensor and a quickstart guide only. The full manual is available in digital form and is always installed on the sensor, accessible through the Web GUI, and available at https://roboception.com/resources/knowledge-base/.
Note
The following items are not included in the delivery unless otherwise specified:
- Couplings, adapters, mounts
- Power supply unit, cabling, and fuses
- Network cabling
Please refer to Accessories for suggested third-party cable vendors.
A connectivity kit can be purchased for the rc_reason_stack. It contains an M12 to RJ45 network cable, 24 V power supply, and a DC plug to M12 power adapter. Please refer to Accessories for details.
Note
The connectivity kit is intended only for initial setup, not for permanent installation in industrial environment.
The following picture shows the important parts of the rc_reason_stack which are referenced later in the documentation.
Parts description
Technical specification¶
The rc_reason_stack can be equipped with on-board software modules for additional features. These software modules can be ordered from the Roboception and require a license update.
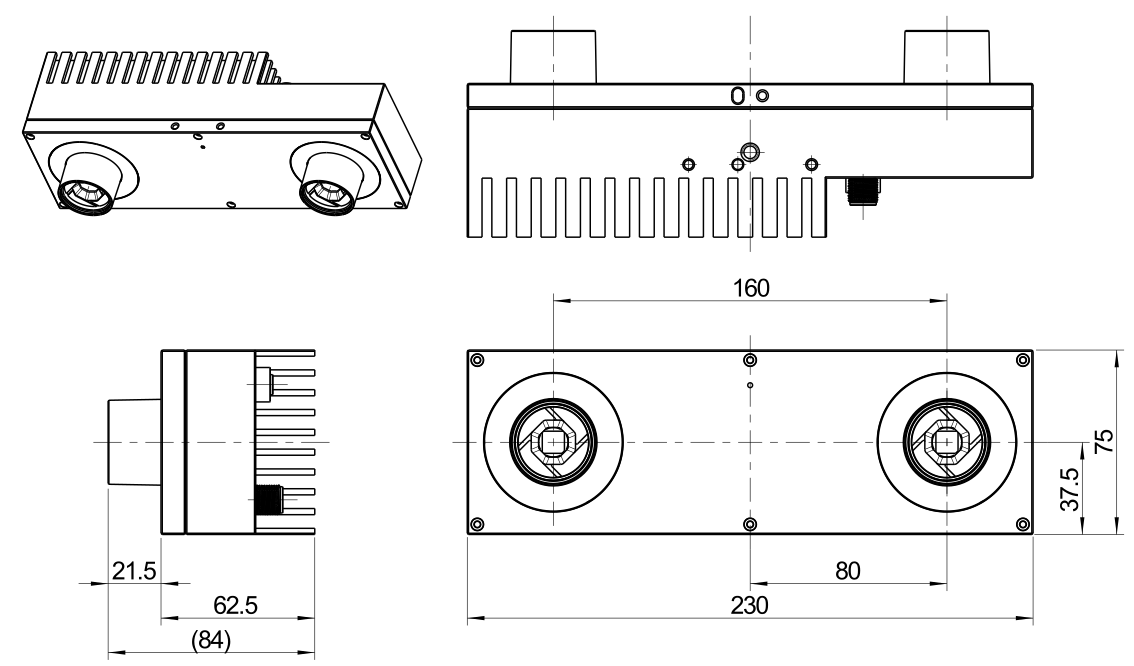
Overall dimensions of the rc_reason_stack 160
CAD models of the rc_reason_stack can be downloaded from http://www.roboception.com/download. The CAD models are provided as-is, with no guarantee of correctness. When a material property of aluminum is assigned (density of \(2.76\mathrm{g\over{cm}^3}\)), the mass properties of the CAD model are within 5% of the actual product with respect to weight and center of mass, and within 10% with respect to moment of inertia.
Environmental and operating conditions¶
The rc_reason_stack is designed for industrial applications. Always respect the storage, transport, and operating environmental
conditions outlined in tab-hardware-environment.
| rc_reason_stack | |
|---|---|
| Storage/Transport temperature | -25 °C to 70 °C |
| Operating temperature | 0 °C to 50 °C |
| Relative humidity (non condensing) | 20 % to 80 % |
| Vibration | 5 g |
| Shock | 50 g |
| Protection class | IP54 |
| Others |
|
The rc_reason_stack is designed for an operating temperature (surrounding environment) of 0 °C to 50 °C and relies on convective (passive) cooling. Unobstructed airflow, especially around the cooling fins, needs to be ensured during use. The rc_reason_stack should only be mounted using the provided mechanical mounting interface, and all parts of the housing must remain uncovered. A free space of at least 10 cm extending in all directions from the housing, and sufficient air exchange with the environment is required to ensure adequate cooling. Cooling fins must be free of dirt and other contamination.
The housing temperature depends on the processing load, sensor orientation, and surrounding environmental temperatures. When the sensor’s exposed housing surfaces exceed 60°C, the LED at the front will turn from green to red.
Warning
For hand-guided applications, a heat-insulated handle should be attached to the sensor to reduce the risk of burn injuries due to skin exposure to surface temperatures exceeding 60°C.
Power-supply specifications¶
The rc_reason_stack needs to be supplied by a DC voltage source. The rc_reason_stack’s standard package doesn’t include a DC power supply. The power supply contained in the connectivity kit may be used for initial setup. For permanent installation, it is the customer’s responsibility to provide suitable DC power. Each rc_reason_stack must be connected to a separate power supply. Connection to domestic grid power is only allowed through a power supply certified as EN55011 Class B.
Warning
Exceeding maximum power rating values may lead to damage of the rc_reason_stack, power supply, and connected equipment.
Warning
A separate power supply must power each rc_reason_stack.
Warning
Connection to domestic grid power is allowed through a power supply certified as EN55011 Class B only.
Wiring¶
Cables are not provided with the rc_reason_stack standard package. It is the customer’s responsibility to obtain the proper cabling. Accessories provides an overview of suggested components.
Warning
Proper cable management is mandatory. Cabling must always be secured to the rc_reason_stack mount with a strain-relief clamp so that no forces due to cable movements are exerted on the rc_reason_stack’s M12 connectors. Enough slack needs to be provided to allow for full range of movement of the rc_reason_stack without straining the cable. The cable’s minimum bend radius needs to be observed.
The rc_reason_stack provides an industrial 8-pin A-coded M12 socket connector for Ethernet
connectivity and an 8-pin A-coded M12 plug connector for power and GPIO connectivity.
Both connectors are located at the back. The location of both connectors on the
rc_reason_stack is shown in fig-electrical-connections.
Locations of the electrical connections for the rc_reason_stack, with Ethernet on top and power on the bottom
Connectors are rotated so that standard 90° angled connectors will exit horizontally, away from the camera (away from the cooling fins).
Pin positions for power and Ethernet connector
Pin assignments for the Ethernet connector are given in fig-ethernet-pin-assignments.
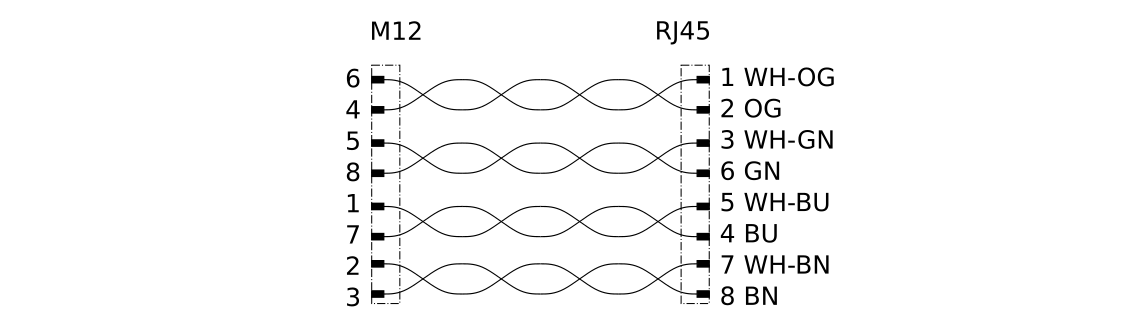
Pin assignments for M12 to Ethernet cabling
Pin assignments for the power connector are given in tab-power-pin-assignments.
| Pin | Assignment |
|---|---|
| 1 | GPIO In 2 |
| 2 | Power |
| 3 | GPIO In 1 |
| 4 | GPIO Gnd |
| 5 | GPIO Vcc |
| 6 | GPIO Out 1 (image exposure) |
| 7 | Gnd |
| 8 | GPIO Out 2 |
GPIOs are decoupled by photocoupler. GPIO Out 1 by default provides an exposure sync signal with a logic high level for the duration of the image exposure. All GPIOs can be controlled via the IOControl module (IO and Projector Control). Pins of unsused GPIOs should be left floating.
Warning
It is especially important that during the boot phase GPIO In 1 is left floating or remains low. The rc_reason_stack will not boot if the pin is high during boot time.
GPIO circuitry and specifications are shown in fig-gpio. The maximum rated voltage for
GPIO In and GPIO Vcc is 30 V.
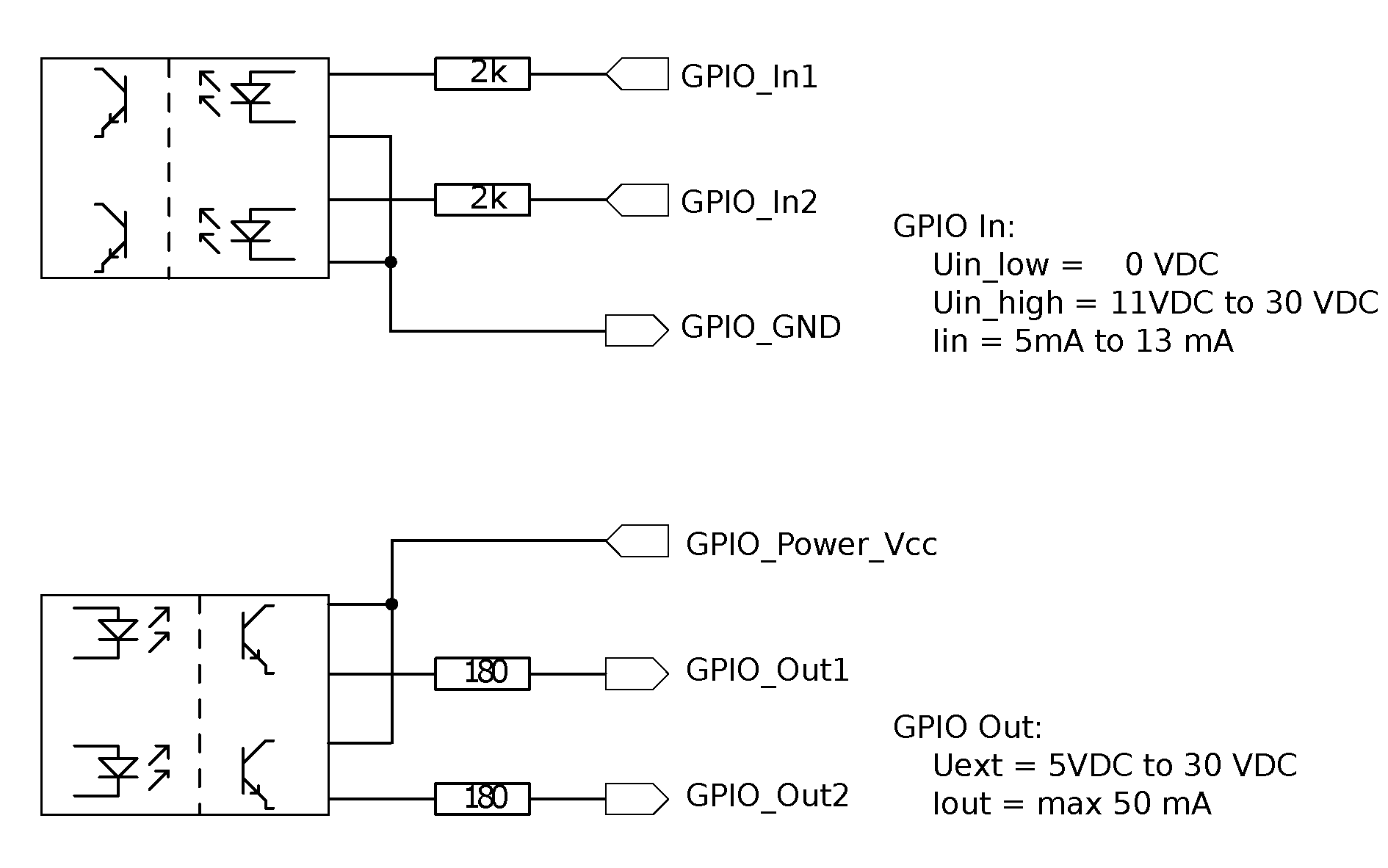
GPIO circuitry and specifications – do not connect signals higher than 30 V
Warning
Do not connect signals with voltages higher than 30 V to the rc_reason_stack.
Mechanical interface¶
Mounting-point for connecting the rc_reason_stack to robots or other mountings
For troubleshooting and static applications, the sensor may be mounted using the standardized tripod thread (UNC 1/4”-20) indicated at the coordinate-frame origin. For dynamic applications such as mounting on a robotic arm, the sensor must be mounted with three M4 (metric standard) 8.8 machine screws tightened to 2.5 Nm and secured with a medium-strength threadlocking adhesive such as Loctite 243. Maximum thread depth is 6 mm. The two 4 mm diameter holes may be used for positioning pins (ISO 2338 4 m6) to ensure precise repositioning of the sensor.
Warning
For dynamic applications, the rc_reason_stack must be mounted with three M4 8.8 machine screws tightened to 2.5 Nm torque and secured with threadlocking adhesive. Do not use high-strength bolts. The engaged thread depth must be at least 5 mm.
Coordinate frames¶
The rc_reason_stack’s coordinate-frame origin is defined as the exit pupil of the left camera lens. This frame is called sensor coordinate frame or camera coordinate frame. An approximate location for the rc_reason_stack is shown in the next image.
The mounting-point frame for the rc_reason_stack is defined to be at the bottom, centered in the tripod thread, with orientation identical to that of the sensor’s coordinate frame.
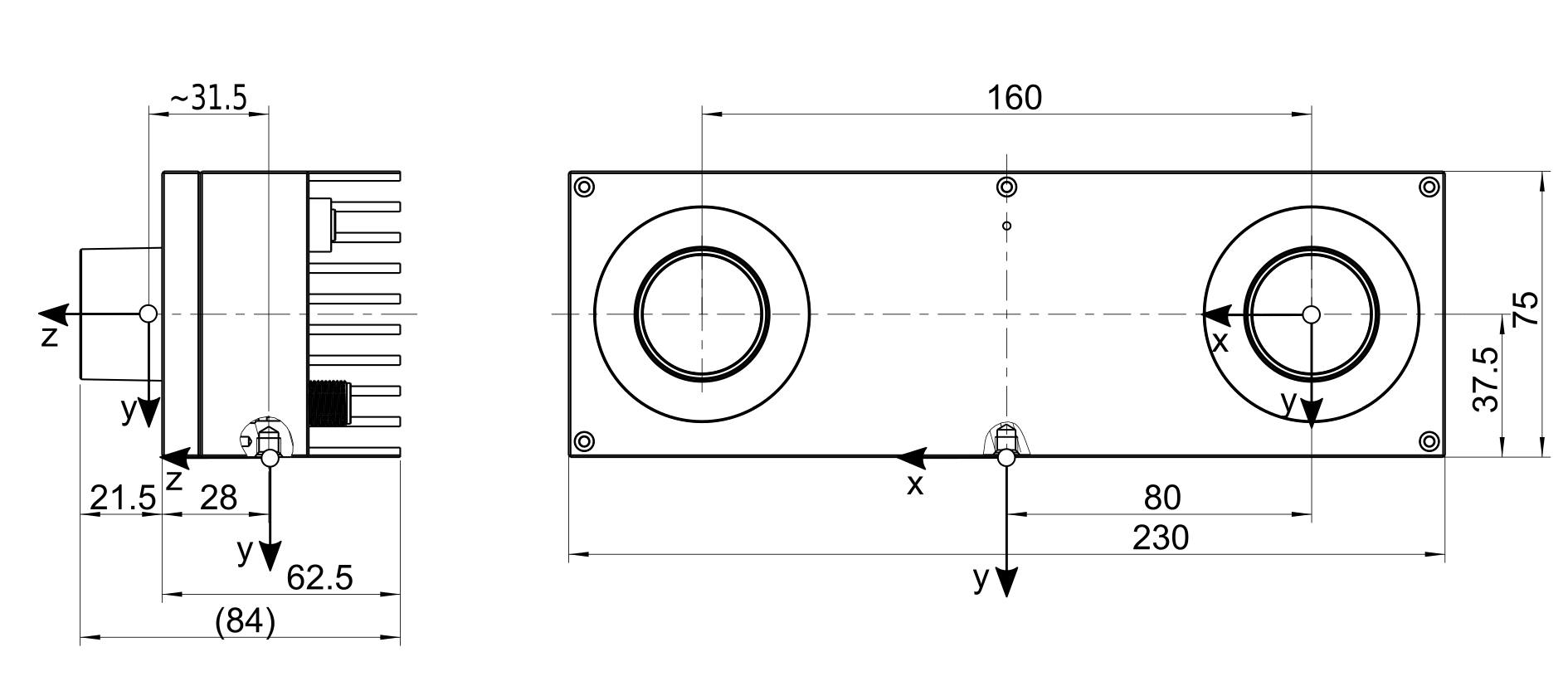
Approximate locations of sensor/camera coordinate frame (inside left lens) and mounting-point frame (at tripod thread) for the rc_reason_stack 160
Note
The correct offset between the sensor/camera frame and a robot coordinate frame can be calibrated through the hand-eye-calibration procedure.